Arquitectura para la gestión de modelos articulados
Manel R. Doménech Osete
Dr . Fernando Barber Mirallés
Dedicado
A Sandra, reina de los bakalas
- Tabla de contenidos
- Prefacio
- I. Introducción
- II. Desarrollo
- III. Validación y resultados
- 8. Resultados
- 9. Banco de pruebas
- 10. Conclusiones
- 11. Trabajo futuro
- IV. Apéndices
Prefacio
La representación de la realidad siempre ha sido uno de los objetivos que más interés han despertado en los seres humanos. Desde las pinturas rupestres en los primeros tiempos, pasando por todas las artes plásticas, hasta los modernos sistemas de simulación interactiva de la realidad y la realidad virtual.
Este proyecto está enmarcado en el campo de la simulación física por ordenador y, por extensión, de la realidad virtual.
La historia de la simulación gráfica por ordenador es relativamente reciente. Sus orígenes se remontan a la aparición de los primeros ordenadores capaces de representar imágenes, dejando atrás los viejos sistemas de visualización en modo texto. La capacidad de representar imágenes desplegó todo un abanico de posibilidades y nuevas aplicaciones para los ordenadores.
Como de costumbre en el mundo de la informática -y de la tecnología en general- la punta de lanza la constituyó el ejército, en el seno del cual apareció el primer simulador de vuelo en la década de los 60.
Es conveniente recordar la distinción entre simulación gráfica y realidad virtual. La simulación gráfica no implica la inmersión en un entorno a través de los sentidos. No implica interacción. Por el contrario, la realidad virtual es una realidad simulada por computador capaz de interactuar con todos los sentidos, o al menos con los mínimos necesarios para producir en el cerebro una sensación de inmersión en el entorno simulado.
No obstante, la capacidad gráfica pronto llegó a los ordenadores personales de 8 bits. Desde ese momento los intentos de simular digitalmente la realidad han sido incontables. Muchos de ellos fructuosos y otros más desafortunados, pero siempre contribuyendo a perfeccionar las técnicas de simulación aprovechando la tecnología del momento.
La simulación de entornos virtuales siempre se mueve en los límites de la tecnología. Siempre aprovecha toda la capacidad de cómputo disponible. Cuanto más rápidos son los ordenadores, más realista es la simulación. Hardware más rápido y algoritmos más avanzados y depurados permiten simular cada vez entornos con mayor lujo de detalles.
Pero simular la realidad es mucho más que mostrar una imagen que la represente en una pantalla. La realidad es dinámica. Cambia con el tiempo y está sujeta a una serie de leyes físicas que determinan los cambios que en ella se producen.
I. Introducción
- Tabla de contenidos
- 1. Presentación
- 2. Estado del arte
- 3. ODE (Open Dynamics Engine)
Capítulo 1. Presentación
Introducción
La creciente potencia de cálculo de los ordenadores ha permitido que actualmente sea factible el uso de técnicas avanzadas de simulación física en cualquier equipo doméstico de gama media.
La simulación física desempeña un papel importante en múltiples campos actualmente en auge, como son la realidad virtual y los videojuegos. También se hace uso de la simulación física en el nuevo cine de animación, donde el realismo de los elementos que componen la escena y sus interacciones alcanza unos niveles inimaginables hace pocos años.
Existen múltiples formas de aprovechar la potencia de cálculo de los ordenadores para hacer simulaciones físicamente realistas: desde incrustar en el código las fórmulas necesarias y calcular la física a bajo nivel, hasta la utilización de paquetes de software destinados a este fin.
El cálculo de la física incrustado en el código de la aplicación no está en consonancia con la filosofía moderna de la programación orientada a objetos ni con la ingeniería del software. Se pierde toda posibilidad de reutilizar el código y su mantenibilidad se complica a medida que crece la aplicación.
El uso de paquetes de software como Endorphin de NaturalMotion o los añadidos de dinámica para 3DStudio MAX son una opción para casos específicos en los que se requiera un entorno integrado para el desarrollo de modelos articulados. La ventaja de estos paquetes es que disponen de todas las herramientas necesarias para la creación, animación y representación de criaturas virtuales articuladas.
La desventaja que presentan las soluciones integradas derivan de la falta de flexibilidad a la hora de utilizar las características de simulación física en un programa propio. Resulta difícil salir del entorno integrado, y el motor de dinámica usualmente se diseña en exclusiva para su funcionamiento en dicho entorno.
Entre incrustar los cálculos para la simulación en el código de la aplicación y utilizar entornos integrados con posibilidad de simulación física, existe una solución intermedia: las librerías y kits de desarrollo de simulación física (Physics SDK). Estas librerías presentan un API con funciones para la simulación física de entornos virtuales. El grado de realismo que ofrecen depende del campo hacia el que se oriente la librería (industrial, videojuegos). Dependiendo de su campo de aplicación, la librería prestará especial atención a la velocidad de cómputo y al tiempo real (caso de los videojuegos), o bien se centrará en la precisión de los resultados (como suele ocurrir en la simulación industrial), con lo que la capacidad de tiempo real se resentirá.
Independientemente del tipo de software escogido para simular un entorno virutal, es necesario caer en la cuenta de que el cálculo de las fórmulas matemáticas de la física es sólo la base sobre la que construir aplicaciones que requieran de este tipo de simulación. Usualmente un programador necesita utilizar la física a un nivel más elevado. Necesita simular objetos del mundo real, y es en este punto donde surgen las complicaciones. Simular el comportamiento físico de un bloque de piedra (suponiéndola un sólido rígido, la cual es una aproximación bastante aceptable en la mayoría de los casos) es una labor relativamente sencilla. Pero cuando se empieza a trabajar con estructuras más complejas, deformables o articuladas, las fórmulas matemáticas ya no son suficientes. Se requiere alguna capa de software por encima de los cálculos físicos que permita agrupar u organizar de alguna manera primitivas físicas para poder tratar objetos complejos como una única entidad (objeto o clase).
En la actualidad el uso de actores virtuales está en auge. Un actor virtual en el contexto de la simulación física por ordenador puede verse como un modelo articulado. Un modelo compuesto por una serie de miembros unidos mediante articulaciones, y algún mecanismo que permita la aplicación de fuerzas sobre los miembros del modelo, haciendo las veces de músculos o motores.
Pero el uso de actores virtuales en aplicaciones programadas en leguajes de propósito general no es todavía una tarea sencilla. Existe una carencia de herramientas y de estándares que dificulta esta labor.
Otro problema deriva del nivel de aplicación de la dinámica, que no suele estar orientado al modelo articulado. La mayoría de motores de simulación física se orientan al sólido rígido o a alguna entidad homogénea con unas propiedades físicas comunes. Esto implica que un programador debe ingeniárselas para montar un modelo articulado a partir de entidades homogéneas y restricciones en grados de libertad entre ellas (articulaciones).
Para trabajar cómodamente con modelos articulados, obviando su implementación y estructura interna, se hace necesario recurrir a herramientas comerciales como endorphin o havok. Este último es el motor utilizado para la simulación de la física en algunos de los últimos videojuegos vistos en el mercado. Dos buenos ejemplos son Max Payne 2 y Medal of honor, en los que la inclusión de havok ha supuesto un salto cualitativo en el realismo del entorno.
Incluso utilizando las escasas herramientas existentes, no se consigue una separación clara entre el entorno físico simulado y el resto de la aplicación. La física, la visualización y el control de los elementos del entorno se suelen solapar entre si, hasta el punto que se vuelve complicado trazar líneas de separación entro ellas.
Como un intento de solucionar, en la medida de lo posible, algunas de las carencias encontradas en el uso de actores virtuales en entornos dinámicos, se ha llevado a cabo este proyecto de fin de carrera. Los objetivos no son pretenciosos en cuanto a la implementación de un programa, pero sí que se pretende esbozar una arquitectura que pueda servir de referencia para el trabajo con modelos articulados y simulación dinámica.
La simulación física en el campo de la realidad virtual y de la animación, aunque últimamente plagado de logros, se encuentra en constante desarrollo. Con este proyecto se pretende aportar un enfoque más o menos original, enfatizando la separación entre la idea de entorno dinámico y las operaciones con las que se relaciona (visualización, control, gestión). Se busca una separación clara entre contenido (modelo físico-matemático del mundo) y el contenedor (cualquier aplicación que trabaje sobre ese modelo).
Objetivos
Para este proyecto se han planteado los siguientes objetivos:
Especificar una arquitectura para la gestión de modelos articulados en entornos dinámicos. La filosofía de esta arquitectura hará énfasis en el encapsulamiento del modelo dinámico del mundo, separándolo conceptualmente de las tareas que sobre él se pueden llevar a cabo (gestión, control y visualización).
Diseñar e implementar un software basado en la anterior arquitectura, orientado al modelo articulado. Es decir, en el que se pueda tratar un modelo articulado o actor virtual como una sola entidad.
Implementar una sencilla aplicación en la que se aprecie la separación de conceptos en que se basa la arquitectura. Crear un modelo articulado y realizar con él las tareas de visualización y control.
Esquema de la memoria
Este documento se estructura en tres partes, cada una constituída por una serie de capítulos. La primera parte presenta informalmente el contexto en el que este proyecto se enmarca. La segunda abarca las tres fases de desarrollo: análisis del problema, diseño e implementación. En la tercera parte se estudiará el sistema obtenido para validarlo sometiéndolo a una serie de pruebas, tests y ejemplos de aplicación.
Capítulo 2. Estado del arte
A lo largo de las diferentes secciones que componen este capítulo se dará una visión general de trabajos que directa o indirectamente dan forma al contexto en el que se desarrolla este proyecto.
El trabajo de Chris Hecker
Chris Hecker, fundador de definition six, es el autor de varios artículos sobre la dinámica del sólido rígido para Game Developer Magazine en los años 96 y 97. Estos artículos están principalmente enfocados al mundo de los videojuegos, y han constituido la base sobre la que varios programadores han desarrollado sus propios motores de dinámica.
Asimismo Hecker llevó a la práctica la información teórica que plasmó en sus artículos, resultando en unos sencillos programas en C que han llegado a convertirse en una referencia imprescindible para cualquier desarrollador interesado en la simulación física por computador.
Capítulo 3. ODE (Open Dynamics Engine)
Introducción
"ODE is a free, industrial quality library for simulating articulated rigid body dynamics - for example ground vehicles, legged creatures, and moving objects in VR environments. It is fast, flexible, robust and platform independent, with advanced joints, contact with friction, and built-in collision detection. "
Esta es la definición que aparece en la sección de ODE de la propia web de su autor. La traducción al castellano es la siguiente:
ODE es una libreria gratuita de calidad industrial para la simulación dinámica de sólidos rígidos, por ejemplo vehículos terrestres, criaturas articuladas y objetos móviles en entornos de realidad virtual. Es rápida, flexible, robusta e independiente de la plataforma, con articulaciones avanzadas, contacto con fricción y detección de colisiones propia.
El código original de ODE se debe al neozelandés Russell Smith. Su distribución bajo el paradigma del código abierto ha hecho posible que diversos programadores interesados en el tema desarrollasen sus propias mejoras y colaboraciones al código original. Este enfoque ha hecho de ODE un motor de dinámica gratuito y de calidad. En su página web se pueden encontrar aplicaciones tanto libres como comerciales que ponen de manifiesto la potencia de este motor.
La web de ODE se encuentra alojada de forma temporal en el servidor de sourceforge. Actualmente, la sección de ODE de la web de Smith es un enlace hacia su localización en sourceforge. Smith pide que los enlaces a ODE se hagan a la sección correspondiente de su web personal. Este es el motivo por el que no se incluirán en este documento referencias a secciones especificas dentro de la web de ODE. No obstante toda la información es fácilmente accesible desde su página principal.
II. Desarrollo
- Tabla de contenidos
- 4. Especificación de requisitos
- 5. Análisis
- 6. Diseño
- 7. Implementación
Capítulo 4. Especificación de requisitos
Este capítulo se organiza siguiendo una interpretación relajada del estándar IEEE 830 para la especificación de requisitos software (ERS). Este estándar sugiere una serie de pautas y una organización de la información que más se deben tener por consejos para una buena especificación que por reglas estrictas.
El hecho de que en este proyecto el propio autor sea también un usuario potencial del sistema resultante simplifica enormemente la labor de la escritura de la especificación de requisitos.
Introducción
Propósito
Este capítulo tiene por objetivo especificar de forma clara qué es lo que se espera del sistema resultante. Es decir, concretar la información que el desarrollador necesita para satisfacer plenamente los requerimientos del cliente o usuario final.
Esta información está destinada tanto al usuario del sistema como al desarrollador del mismo, y constituye el punto informativo de unión más importante entre ambos.
Aún siendo el autor un usuario potencial del sistema, se ha pensado en las necesidades de la comunidad de desarrolladores interesados en la simulación dinámica por ordenador para establecer los requisitos del sistema.
Ámbito del sistema
Puesto que la base de este sistema es la librería ODE de Russell Smith, y su funcionalidad puede verse como una ampliación de esta librería, se toma ODEX (ODE eXtension) como nombre del proyecto. Es un nombre corto y sencillo de recordar, y hace honor al excelente trabajo previo realizado por Smith.
ODEX está pensado para facilitar la inclusión de modelos articulados en sistemas software. Estos modelos articulados pueden utilizarse para diseñar actores virtuales con un comportamiento físico realista. Los actores virtuales pueden controlarse utilizando sistemas que apliquen fuerzas a sus articulaciones y obtengan información de estado del modelo. Los sistemas de control basados en la inteligencia artificial son la principal área de interés de ODEX, aunque es perfectamente factible su uso en cualquier aplicación que requiera la simulación dinámica de un entorno.
ODEX puede ser usado a dos niveles: como una librería de funciones en C++, o como un proceso independiente que se comunica con la aplicación que lo requiera. Siendo utilizado como librería se pierde la independencia del lenguaje. Se ha escogido C++ por ser el lenguaje de implementación de la mayoría de motores gráficos, que son los sistemas más susceptibles de requerir simulación dinámica. Como proceso, ODEX se comunica con las aplicaciones mediante el interfaz sockets. Con esto se gana en independencia tanto del hardware como del lenguaje de la aplicación, aunque el canal de comunicación puede ser un factor limitante en el rendimiento. Indistintamente sea utilizado como librería o como proceso, las funciones que representa para el usuario son las mismas.
Se parte de la base de que el usuario dispone de un modelo articulado con un formato conocido por ODEX. Esto es, un conjunto de miembros y articulaciones junto con sus propiedades físicas y geométricas, necesarias para el cálculo de la dinámica y la gestión de colisiones. La parte artística corre por cuenta del usuario, que se encargará de cubrir el modelo fisico-geométrico manejado por ODEX con un modelo tridimensional de la misma forma, o aproximada, detallado y texturizado. Esto significa que ODEX no muestra nada, pues maneja un modelo invisible en el que la información sobre la geometría se utiliza exclusivamente para la detección de colisiones.
Capítulo 5. Análisis
En este capítulo se tomarán las decisiones previas al diseño, con el objetivo de acometerlo con suficientes garantías de éxito. Se hará especial hincapié en que el sistema software resultante sea lo más genérico posible, robusto, modular y portable.
Partiendo de la base de que el código interno de ODE está programado en C++, y su interfaz en C estándar, se adoptará C++ como lenguaje de implementación del programa. En la parte de implementación se hará un estudio más detallado del porqué de la elección de este lenguaje. La utilización de un lenguaje orientado a objetos como C++ representa además la posibilidad de modelar el sistema en un lenguaje visual de modelado como UML de una forma casi directa.
Existen también implementaciones de ODE en Java y Ruby, pero presentan diversas desventajas para los objetivos que se persiguen. Java es un lenguaje semicompilado y Ruby es interpretado. Para aplicaciones de simulación física en tiempo real la velocidad de ejecución es crucial, y actualmente estos lenguajes no pueden alcanzar el rendimiento que un lenguaje compilado como C++ brinda para este tipo de aplicaciones.
Se hará uso de toda la potencia que la programación orientada a objetos proporciona con el uso de la herencia y el polimorfismo. Esto evitará la escritura de código redundante y potenciará la modularidad del diseño. Además, el uso de la herencia permitirá extender fácilmente el software, derivando las clases necesarias a partir de las clases implementadas en la aplicación.
Preparación del modelo
A partir de la especificación de requisitos se esbozará en esta sección una arquitectura informal para el programa. Más adelante se irá perfilando hasta conseguir una arquitectura lo suficientemente consistente y formal con la que trabajar en la fase de diseño. Esta arquitectura se centrará más en qué debe hacer el programa, y no tanto en cómo debe hacerlo.
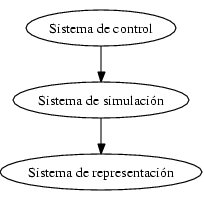
La idea principal de este proyecto viene determinada por la separación clara entre el sistema de simulación física y los sistemas de visualización y control. Esquemáticamente se puede ver el sistema de simulación como un proceso que sirve información al sistema de representación y la recibe del sistema de control. Es decir, la interacción con el mundo simulado se realiza enviando o recibiendo información del sistema de control. La Figura 5-1 muestra gráficamente esta interacción entre los diferentes sistemas. Más adelante se matizarán las formas de transmitir la información.
Figura 5-1. Esquema de interacción entre el sistema de simulación y los sistemas de representación y control
Otro aspecto importante es la forma de abstraer objetos del mundo real en el mundo virtual. Para ello se diseñará una jerarquia de clases capaz de describir desde las primitivas más simples hasta modelos articulados complejos. Dos clases básicas de esta jerarquia serán las que representan un sólido rígido y una articulación. Cada sólido rígido y articulación determinará un sistema de coordenadas respecto al cual podrán ubicarse otras entidades. Esto llevará a la formación de cadenas de sistemas de referencia o sistemas de referencia anidados.
Las primitivas físicas se derivarán de las clases base sólido rígido y articulación. Así, las clases para describir sólidos rígidos concretos, con sus atributos de forma y masa, vendrán definidas por diferentes especializaciones de la clase base sólido rígido. Del mismo modo, tipos de articulación concretos, con atributos como el número de grados de libertad y ejes de rotación o traslación, derivarán de la clase genérica articulación.
Las primitivas básicas que se implementarán para definir sólidos rígidos son las siguientes:
Esfera
Caja
Cápsula (cilindro de extremos redondeados)
Y para definir articulaciones, se implementarán las siguientes primitivas:
Telescópica (1 grado de libertad traslacional)
Bisagra (1 grado de libertad rotacional)
Universal (2 grados de libertad rotacionales)
Doble bisagra (dos bisagras conectadas en serie con diferentes ejes de rotación, tiene 2 grados de libertad rotacionales)
Esférica (3 grados de libertad rotacionales)
Fija (ningún grado de libertad)
Hay que hacer notar que estas primitivas son exactamente las que implementa ODE. Lo que se hará en este proyecto es encapsularlas en clases pertenecientes a una jerarquía que permita trabajar con agrupaciones de estos elementos de construcción de una forma eficaz. Es decir, facilitar el trabajo con modelos articulados.
Si la especialización de las clases sólido rígido y articulación daba como resultado las primitivas básicas de construcción, agrupaciones de estas clases permitirán definir estructuras más complejas formadas por una serie de sólidos rígidos unidos mediante articulaciones. Estas estructuras vendrán definidas por la clase grupo dinámico. A su vez, especializaciones de esta clase permitirán definir diversos tipos de grupos dinámicos. Una criatura virtual es un buen ejemplo de especialización de un grupo dinámico, pues consiste en un conjunto de miembros unidos por articulaciones, pero además posee otros atributos y funciones que la caracterizan como criatura.
Una clase grupo, además de contener sólidos rígidos y articulaciones, también podrá contener otros grupos. Así, un mundo virtual no será más que una especialización de la clase grupo, ya que contiene sólidos, articulaciones y otros grupos, además de atributos tales como la gravedad.
Cada articulación incluirá motores para aplicar fuerzas en cada uno de sus grados de libertad. El control de estos motores se hará por velocidad deseada. Es decir, el sistema aplicará la fuerza necesaria para que el motor alcance la velocidad indicada. La fuerza máxima que un motor puede aplicar será un parámetro configurable.
Además de disponer de una jerarquia de de clases para describir un mundo virtual, se hace necesario un método para dotar de persistencia al modelo y sus elementos, una forma de guardar en memoria secundaria el estado del mundo en un instante determinado, así como descripciones de los modelos articulados que en él se desenvuelven.
Hasta aquí quedan introducidos informalmente los elementos y clases necesarios para describir un mundo virtual. A lo largo de las secciones siguientes se analizará cada clase en profundidad.
Nomenclatura utilizada
Para hacer el código accesible al mayor número de personas, se utilizará el inglés en los nombres de clases, variables y funciones. Además se utilizará la convención de iniciar los nombres de las clases con la letra C mayúscula para evitar su confusión con otras estructuras.
Asimismo, se adoptará el término criatura virtual o simplemente criatura para hacer referencia a los modelos articulados que se desenvuelven en el mundo virtual. Esta elección se debe al enfoque de este proyecto hacia campo de la inteligencia artificial. El término actor virtual induce a pensar en una figura antropomórfica, mientras que modelo articulado resulta demasiado genérico para definir entidades autónomas dotadas de inteligencia simulada.
Identificación de las clases
Durante la preparación del modelo se han podido distinguir varias clases informales. Ahora se formalizarán un poco más, dándoles nombres concretos y colocándolas en su lugar en un primer diagrama de clases, que se irá perfilando y ampliando conforme se avance hasta la fase de implementación.
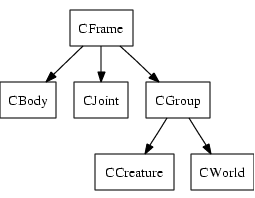
Se empezará por las clases básicas para la construcción de un modelo articulado: los miembros y las articulaciones. Puesto que este proyecto se basa en la librería ODE, se utilizará su léxico, siempre que sea posible, para las diferentes clases que se definan. ODE utiliza la nomenclatura de body y joint para los sólidos rígidos y las articulaciones respectivamente. Así, se definen las clases CBody y CJoint.
Se desea disponer de un sistema de coordenadas local para cualquier elemento del mundo, especialmente para sólidos y articulaciones. Para ello se definirá una clase que represente un sistema de coordenadas (un marco de referencia), con funciones para su gestión. El nombre que recibirá esta clase es CFrame, y de ella derivará el resto de clases que requieran determinar un sistema de coordenadas, como CBody y CJoint.
Ahora cabe preguntarse por las agrupaciones de los elementos básicos de construcción. Pensándolo un poco, tanto una criatura virtual como el mundo en el que se desenvuelve van a estar constituidos por agrupaciones de elementos base y otras agrupaciones. De este modo se define la clase CGroup, que va a contener miembros, articulaciones y otros grupos.
Es fácil darse cuenta de que las clases para representar criaturas y mundos (CCreature y CWorld respectivamente) van a derivar de CGroup, pues ambas son en esencia agrupaciones de elementos básicos de construcción y de otras agrupaciones.
Se considerará también que tanto el mundo virtual como las criaturas poseen un sistema de coordenadas particular. Es decir, que un grupo de elementos de construcción determina su propio marco de referencia, razón por la cual se derivará la clase CGroup a partir de CFrame.
Una jerarquía de clases informal, a falta de perfilar varios detalles de diseño, quedaría como muestra la Figura 5-2
Capítulo 6. Diseño
En este capítulo se abordará la fase más importante previa a la implementación: el diseño. Detrás de un proyecto software de cierta magnitud, el diseño apuntala la implementación para que el producto resultante no se convierta en un caos difícil de manejar. Por este motivo se utilizará UML (Unified Modeling Language) para especificar los elementos y procesos que constituyen la aplicación.
UML es un lenguaje gráfico para visualizar, especificar y documentar cada una de las partes que comprende el desarrollo de un proyecto. Aunque tiene aplicación en múltiples campos, resulta especialmente util en el modelado de proyectos software.
La simulación de modelos articulados es muy susceptible de ser diseñada según el paradigma de la OOP (Object Oriented Programming), pues es casi directa la relación entre los objetos físicos del mundo real y los objetos o clases de los lenguajes de OOP. UML permite trabajar con objetos de manera visual, intuitiva y cómoda, por lo que resulta especialmente indicado para especificar este proyecto.
Este proyecto se construye sobre la base del motor de dinámica ODE (Open Dynamics Engine). El código interno de ODE está programado en C++ y su interfaz en C estándar.
III. Validación y resultados
- Tabla de contenidos
- 8. Resultados
- 9. Banco de pruebas
- 10. Conclusiones
- 11. Trabajo futuro
IV. Apéndices
- Tabla de contenidos
- A. Comparación de motores de dinámica
- B. Herramientas utilizadas para el desarrollo del proyecto
Apéndice B. Herramientas utilizadas para el desarrollo del proyecto
Se ha tratado, en la medida de lo posible, utilizar siempre herramientas gratuitas para el desarrollo de este proyecto. La búsqueda y selección de estas herramientas a lo largo del desarrollo del proyecto ha hecho patente la enorme cantidad de herramientas gratuitas disponibles en el mundo del open source. Aunque de calidad muy variable, se han hallado multitud de herramientas relacionadas con el tema de la simulación dinámica y la realidad virtual. No obstante, en ciertos campos, el software comercial sigue sin tener rival gratuito.
Además de las herramientas directamente relacionadas con el proyecto, es decir, con la simulación dinámica y la realidad virtual, se mencionarán aquellas que han servido tanto para organizar como para documentar el sistema software.