Next: Calibrado de amplitudes Up: LA INTERFEROMETRÍA EN RADIOASTRONOMÍA Previous: Los observables de VLBI
En esta sección explicaremos un proceso fundamental para la calibración de los datos interferométricos de VLBI.
El Ajuste de Franjas o Fringe Fitting es un algoritmo con el que se pretenden calcular las diferencias entre el modelo de interferómetro que se ha usado en el correlador (y mediante el cual se han calculado los retrasos relativos y las rotaciones de fase necesarias para centrar la correlación en un punto determinado del cielo) y el interferómetro real con el que se han tomado los datos.
Todas las pequeñas contribuciones no modeladas que afectan al resultado de la correlación pueden llegar a ser (y lo son con mucha frecuencia) decisivas en cuanto al éxito de un experimento se refiere. De no diseñarse una observación con sumo cuidado para poder estimar bien todos estos factores, tal observación puede estar condenada inexorablemente al fracaso incluso antes de realizarse.
Seguidamente describiremos el procedimiento con el que se eliminan de los datos las contribuciones de todos estos efectos no deseados en las visibilidades medidas.
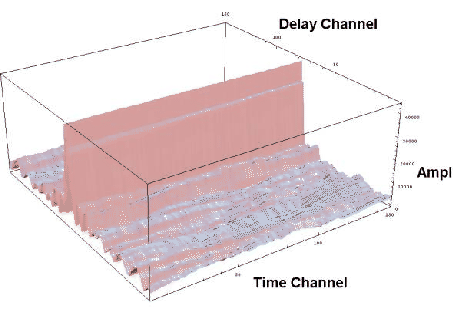
Construyamos una matriz en la que los elementos sean los coeficientes de correlación compleja entre las señales de dos antenas A y B. En las filas de la matriz ordenaremos tales coeficientes según el retraso relativo entre las señales correlacionadas; en las columnas, los datos estarán ordenados según los distintos tiempos en los que la correlación se centró. Podemos llamar a esta matriz delay-time (retraso-tiempo). Las amplitudes de los coeficientes de correlación en dicha matriz toman la forma de la figura 7, en la que para una fila dada se tiene una forma de tipo senocociente (en valor absoluto) y la selección de una columna tiene una forma aproximadamente constante (ya que la franja persiste en el tiempo para intervalos cortos). Los coeficientes de correlación de la figura 7 corresponden a una observación interferométrica realizada con una onda de sonido y dos micrófonos como receptores, de manera que se pudieron reproducir en una computadora todos los pasos seguidos en una correlación real de VLBI (en el capítulo 3 describimos este experimento).
Si hallamos cuál es la fase de los coeficientes de correlación en la matriz delay-time veremos que en cada fila varía linealmente, con frecuencia igual a la de la radiación recibida (rebajada con los osciladores locales). En cada columna también varía linealmente, pero con frecuencia igual a la originada por el efecto Doppler residual entre las antenas, dado que una diferencia entre las frecuencias de dos señales se traduce en una variación temporal lineal de la fase relativa entre dichas señales.
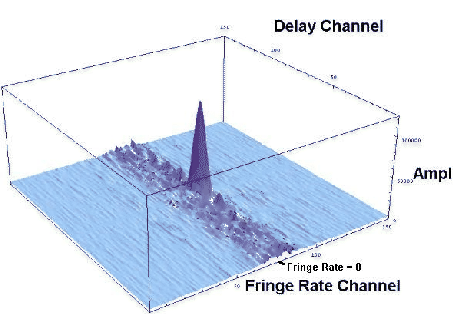
Hallando la transformada de Fourier de la matriz retraso-tiempo en la dirección del tiempo obtendremos la denominada matriz delay-rate (retraso-ritmo de franja), que tendrá una forma picuda en la dirección del ritmo de franja (o fringe rate, variable conjugada del tiempo). La estructura de las amplitudes de los coeficientes en esta matriz es la que se muestra en la figura 8, obtenida a partir de los datos representados en la figura 7. Las coordenadas de retraso y fringe rate para las que encontramos el pico de esta matriz son, por lo tanto, un buen estimado del retraso relativo residual y del ritmo de franja residual entre las señales correlacionadas.
El proceso de Ajuste de Franjas (o Fringe Fitting) se basa en la obtención, mediante la construcción de las matrices delay-rate, de los residuales de retraso y de fringe rate, de manera que podamos aplicar correcciones al modelo del retraso y a las fases de las señales de cada estación, aumentando así la coherencia de las visibilidades, tanto en frecuencia como en tiempo.
Al estimar el retraso residual eliminaremos la pendiente de la fase con respecto a la frecuencia y aplicando las correcciones de fringe rate residual eliminaremos la dependencia de la fase con respecto al tiempo (que supondremos ajena a la fuente).
Congelar las fases en el tiempo se traducirá en un incremento de la señal a ruido, puesto que podremos hacer medias temporales de incluso minutos, durante los cuales se presupone que la variación de la fase debida a la estructura de la fuente es muy pequeña3.
La manera de proceder en el ajuste de franjas es suponer que se está observando una fuente puntual perfectamente centrada (es decir, que todas las matrices delay-rate deberían tener sus máximos centrados, o sea, con residuales de retraso y fringe rate nulos y con las fases de las visibilidades en el máximo también nulas). El algoritmo de Fringe Fitting trata de averiguar entonces qué correcciones de retraso, fringe rate y fase hay que aplicar a cada visibilidad para que esto ocurra.
Si presuponemos que todos los residuales en retraso y fringe rate son producidos por correcciones que dependen de cada antena (y no de cada línea de base), como ocurre cuando tenemos derivas de reloj o efectos atmosféricos, aplicamos el denominado Global Fringe Fitting que, mediante un ajuste de mínimos cuadrados, encuentra las correcciones dependientes de antena que mejor reproducen los residuales encontrados en todas las líneas de base.
Las correcciones de fase dependientes de antena se definen de acuerdo a lo que se conoce como ganancia compleja de antena.
En efecto, sea ![]() el retraso residual de la antena
el retraso residual de la antena ![]() ,
, ![]() el fringe rate residual de tal antena y
el fringe rate residual de tal antena y ![]() la fase de su
ganancia
compleja, calculado todo en el instante
la fase de su
ganancia
compleja, calculado todo en el instante ![]() . Entonces, el coeficiente de
correlación entre las antenas
. Entonces, el coeficiente de
correlación entre las antenas ![]() , debidamente calibrado y calculado en
el instante
, debidamente calibrado y calculado en
el instante ![]() para un retraso
para un retraso ![]() , deberá ser:
, deberá ser:
| (13) |
donde ![]() es el coeficiente de correlación observado, o sea,
sin calibrar.
es el coeficiente de correlación observado, o sea,
sin calibrar.
A partir de todas las líneas de base ![]() , el Global
Fringe Fitting debe encontrar para todas las antenas los valores de
, el Global
Fringe Fitting debe encontrar para todas las antenas los valores de
![]() ,
, ![]() y
y ![]() que mejor ajustan al modelo de fuente
centrada, es decir, que más aproximan a cero las fases de
que mejor ajustan al modelo de fuente
centrada, es decir, que más aproximan a cero las fases de
![]() .
.
La parte mala del Global Fringe Fitting es que la sobreinformación en el ajuste (ya que hay muchas más líneas de base que antenas) impide seleccionar el verdadero máximo de correlación en todas las matrices delay-rate, si bien los residuales ajustados deberían, en circunstancias normales, caer muy cerca de los máximos reales de las matrices. La parte positiva del Global Fringe Fitting es que las soluciones (al ser dependientes tan sólo de cada antena) no afectan para nada a las clausuras de fase, por lo que la calibración no cambiará en nada la determinación de la estructura de la fuente en estudio.
Evidentemente, las fuentes que tienen estructura (i. e., fases no nulas en ciertas regiones del plano UV asociado) conllevarán a una variación temporal de la fase que nada tendrá que ver con el fringe rate residual ni con las necesarias correcciones de fase de las antenas. Puesto que estas fases no nulas son inherentes a las clausuras de fase y el Global Fringe Fitting no afecta a tales clausuras, la estructura de la fuente quedará entonces impresa en los residuos del ajuste de las fases del Fringe Fitting.