


Daniel Mendoza Carro
Daniel Mendoza Carro
#song_name: Finn_the_luver
#song_name: hello_friend
#song_name: La_vie_en_roze
#song_name: MR. T O B O R
reproducing:
time:
secs
/
secs
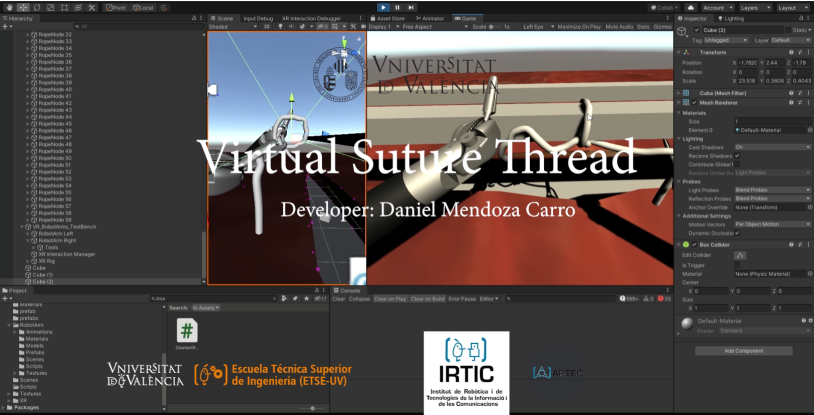
Proyecto desarrollado durante el trabajo de final de grado en colaboración con el grupo
de investigación ARTEC.
El trabajor consiste en la simulación de una sutura virtual para su incorporación al proyecto del simulador de robot Da Vinci, llevado a
cabo en el Instituto de Robótica y Tecnologías de la Información y la Comunicación (IRTIC).
Contenido mixto entre realidad y animación. Trabajo realizado con software de seguimiento (Tracking) y interpolaciones de movimiento desarrolladas por el equipo de programadores en Blender 2.8.

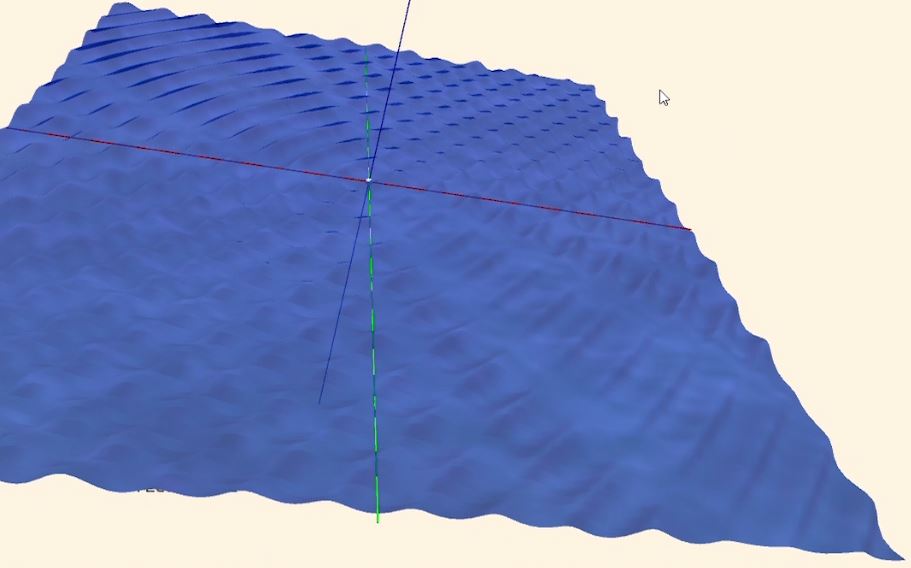
Para la representación de las olas en el ámbito de la simulación se hace uso de una técnica básica llamada mapas de altura. Un mapa de altura consiste en un conjunto de puntos con 3 coordenadas (x, y, z) distribuidos homogéneamente en un plano (por ejemplo, en una sección del plano XZ). Las coordenadas x, z de los puntos del plano permanecerán constantes en dicho plano (o bien pueden variar ligeramente en una zona local en torno al punto de reposo), mientras que la coordenada que representa la altura (y) estará sometida a variaciones en su valor que son producidas por una función periódica (o una combinación de varias), generalmente de tipo trigonométrico (seno, coseno)
Tipos de onda implementadas:
Onda radial.
Onda direccional.
Onda Gerstner.
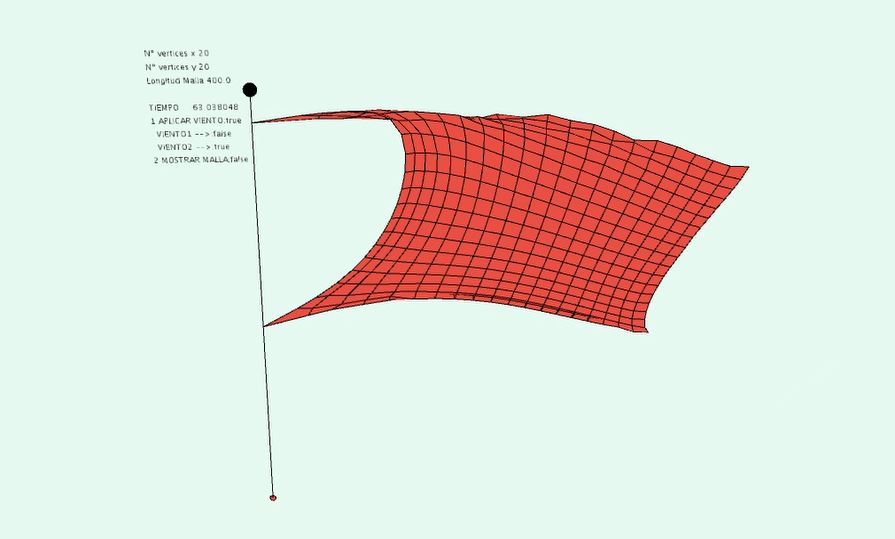
Para simular esta mecánica de solidos deformables tendremos en cuenta el planteamiento lagrangiano. De manera que identificaremos cada partícula que compone el objeto mediante sus coordenadas x e y en el espacio, conectadas entre si mediante muelles, guardando esta posición inicial de referencia se verán expuestas a la interacción de una fuerza externa. El movimiento inducido en cada par de partículas conectadas directamente, viene determinado por el muelle que las enlaza. De manera que en cada instante t de la simulación obtendremos las coordenadas (x,y) de cada una de las partículas y su variación definirá la deformación final del objeto.
Implementando distintas estructuras de malla, analizamos el comportamiento de la bandera cuando esta es sometida a las fuerzas del viento. Alternando entre estructuras de tipo "Structural", "Shear" y "Bend" observaremos comportamientos diferentes.
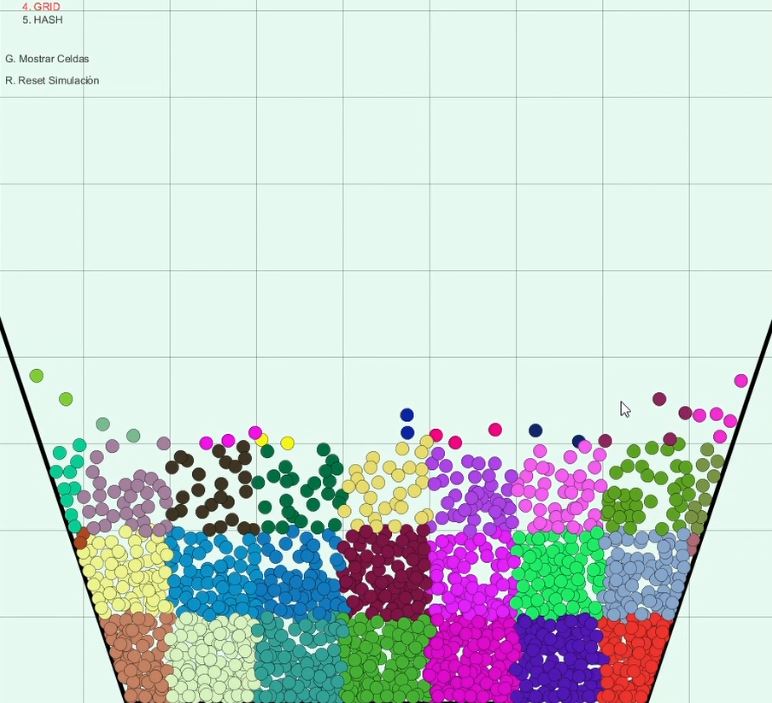
La estrategia de comprobación de fuerza bruta (“todas contras todas”) genera un
coste de comprobación de colisiones de O(n^2) donde n es el número de partículas.
Cuando n es muy grande, esta estrategia no es en nada adecuada.
Para mejorar la escalabilidad del sistema se pueden utilizar estructuras de datos para agrupar las
partículas vecinas y estudiar las colisiones sólo en el entorno de cada partícula. Estos métodos,
aunque llevan un coste asociado a la actualización de las estructuras de datos en cada frame, son más
eficientes que la estrategia de fuerza bruta de “todas contra todas” si el número de partículas n es muy grande.
En las simulaciones realizadas se implementas las estructuras de Grid y Hash, como pueden verse en el vídeo de
la imagen