Tema 3. Simulación de Objetos Deformables.
Podemos definir el movimiento de partículas con posiciones x e y en el espacio aplicando las derivadas correspondientes de velocidad y aceleración, como hemos visto en los temas anteriores. De esta manera podemos determinar de manera controlada cual va a ser el comportamiento de una partícula conociendo sus parámetros iniciales.
En este tema no tratamos ya con partículas como elemento principal, sino como componente de un grupo de más partículas que en su conjunto conformen y simulen un objeto deformable.
La definición de los parámetros de las interacciones entre las partículas que conforman un mismo objeto determinará la reacción (deformación) del mismo con respecto a las distintas fuerzas externas e internas que puedan tener lugar.
Modelo masa-muelle.
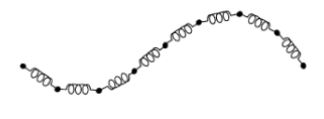
Para simular esta mecánica de solidos deformables tendremos en cuenta el planteamiento lagrangiano. De manera que identificaremos cada partícula que compone el objeto mediante sus coordenadas x e y en el espacio, conectadas entre si mediante muelles, guardando esta posición inicial de referencia se verán expuestas a la interacción de una fuerza externa. El movimiento inducido en cada par de partículas conectadas directamente, viene determinado por el muelle que las enlaza. De manera que en cada instante t de la simulación obtendremos las coordenadas (x,y) de cada una de las partículas y su variación definirá la deformación final del objeto.
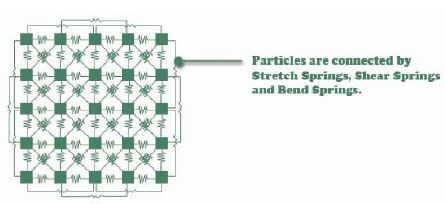
Simulación de telas.
Es una extensión del problema anterior. Al fin y al cabo siguen siendo muelles que conectan partículas y que ejercen fuerzas sobre ellas.
En este caso el problema se plantea en 2D. Las conexiones forman una estructura en forma de malla, dando lugar a un sistema de vecinos en donde cada partícula es influenciada por las conexiones con las que tiene conexión más directa:
En el vídeo se explican las distintas estrategias que podemos seguir para estructurar las conexiones y conseguir distintos resultados: